
Autonomous NDT Tribological Process Simulator
This rig automates high-temperature scratch testing; Python computer vision quantifies wear and ML detects galling, backed by a local-to-cloud data pipeline.
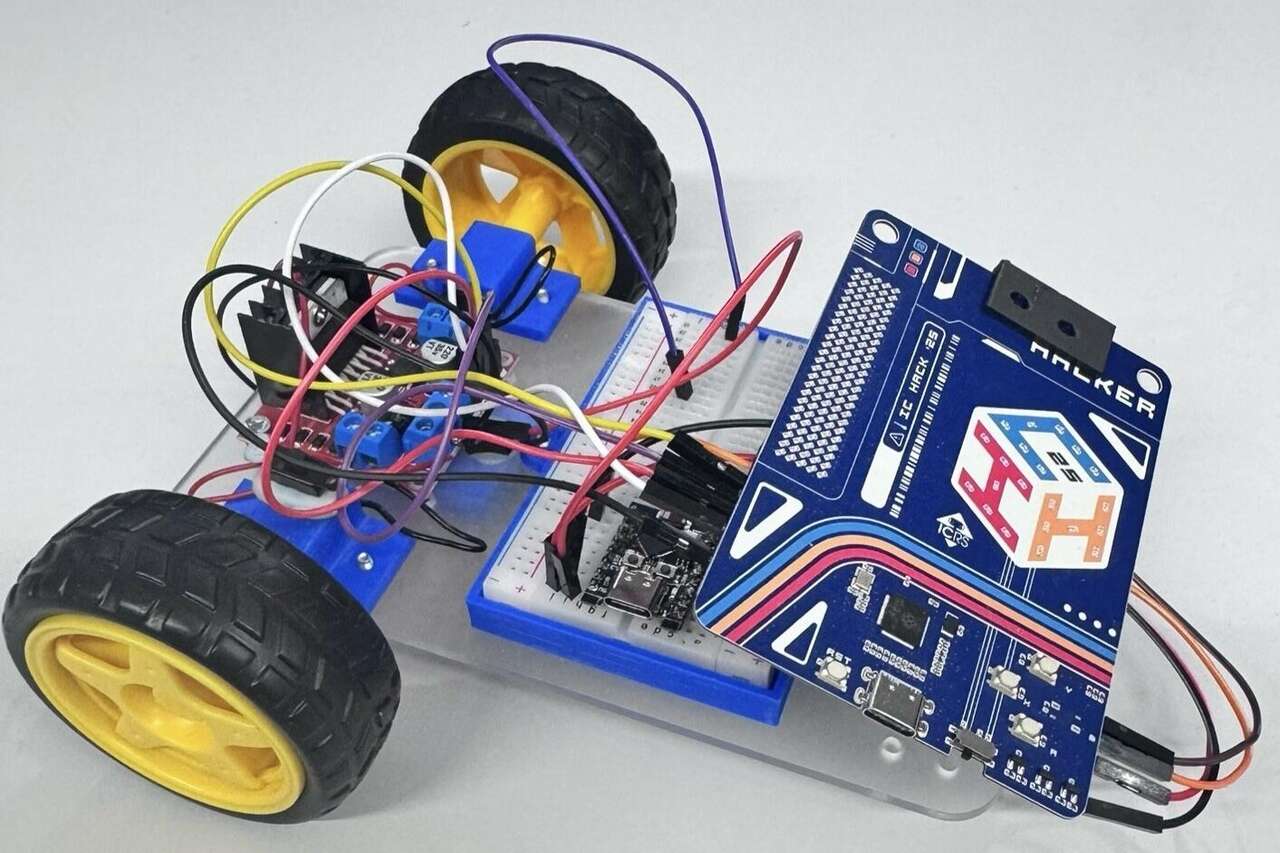
Natural Language Robotic Programming (Edu-Rob)
The robot converts plain-English instructions into validated ESP32 control code via an LLM-backed web interface; project finished runner-up at ICHACK25.

Liquid Rocket (EuRoC)
Designed, manufactured, and flown to 2,664 m in the liquid 3 km category; achieved the first liquid-propellant launch in competition history, with work spanning propulsion, structures, and systems integration.

Compressed Gas-Powered Car
Team-built CO₂ vehicle designed, simulated, and fabricated to exceed 50 m, placing 1st out of 40 through aerodynamic and mass optimisation.

Aircraft Engine Technology (AET)
Developed a complete engine concept with performance analysis and detailed CAD; final report ranked 1st out of 15.
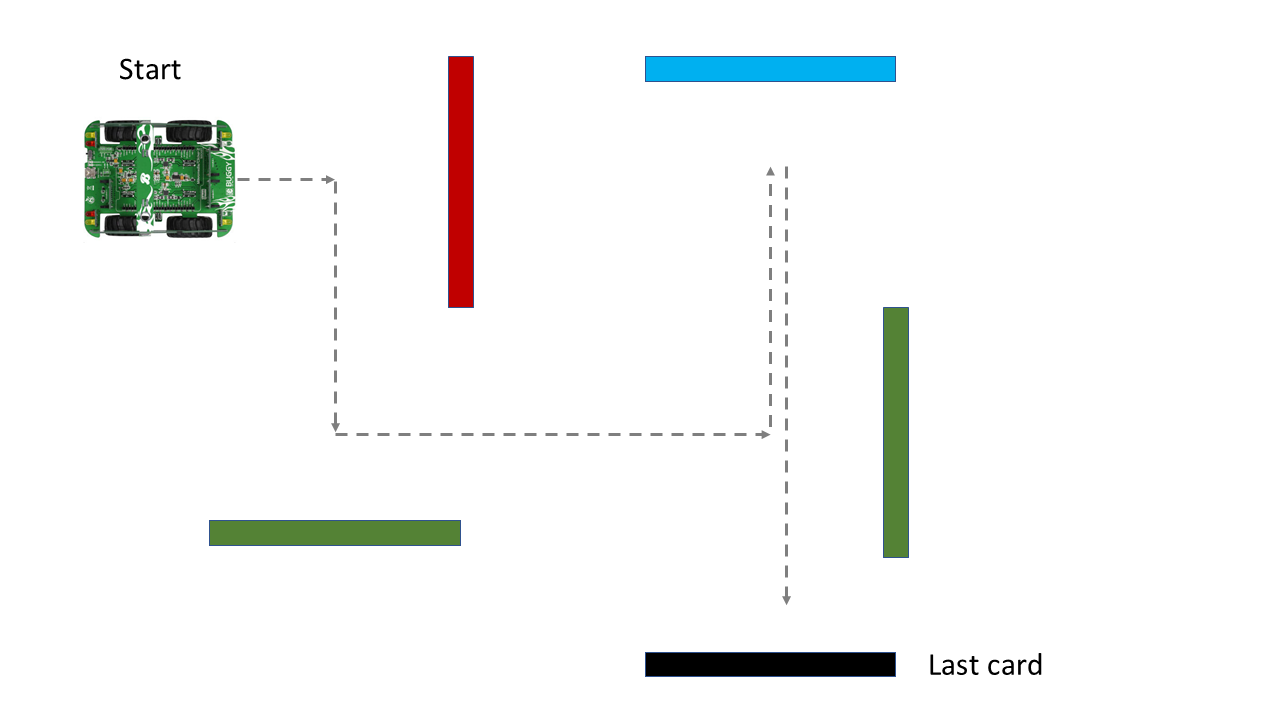
Autonomous Vehicle (Embedded C)
PIC-based colour-detection maze solver with dynamic response. Placed 1st of 37 teams with fastest time; met no-interference reliability criteria.
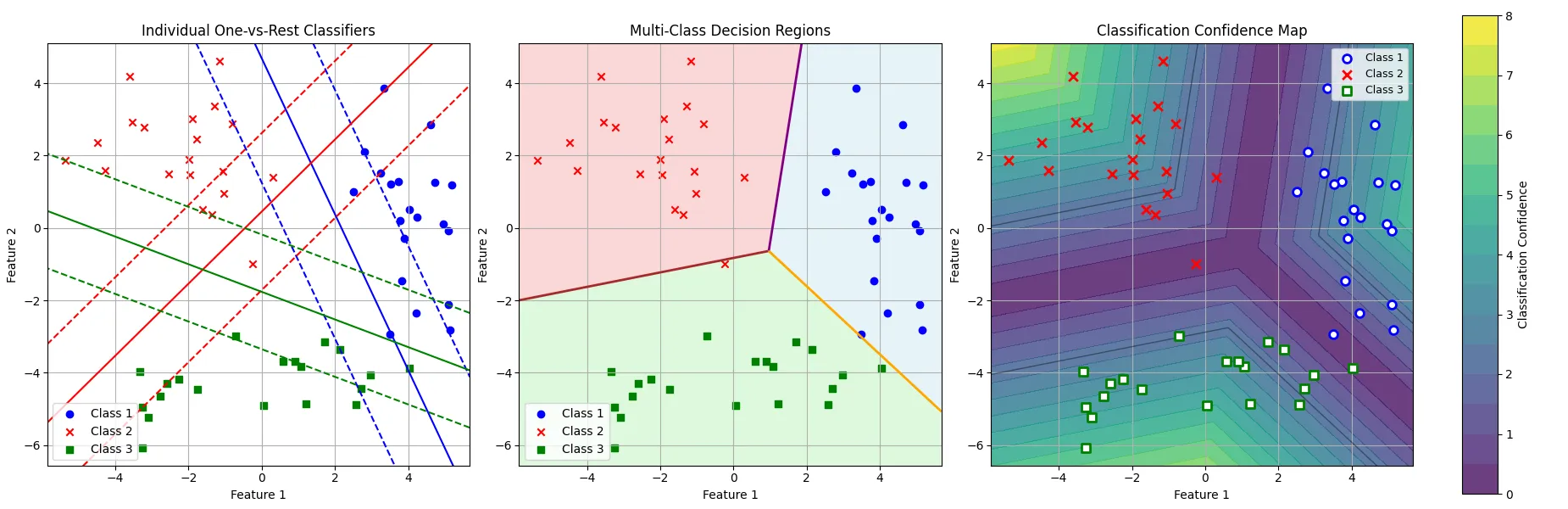
Applied Optimisation (SVM from Scratch)
Implemented linear and kernel SVMs in Python/CVXPy (no scikit-learn) and evaluates performance across four datasets.
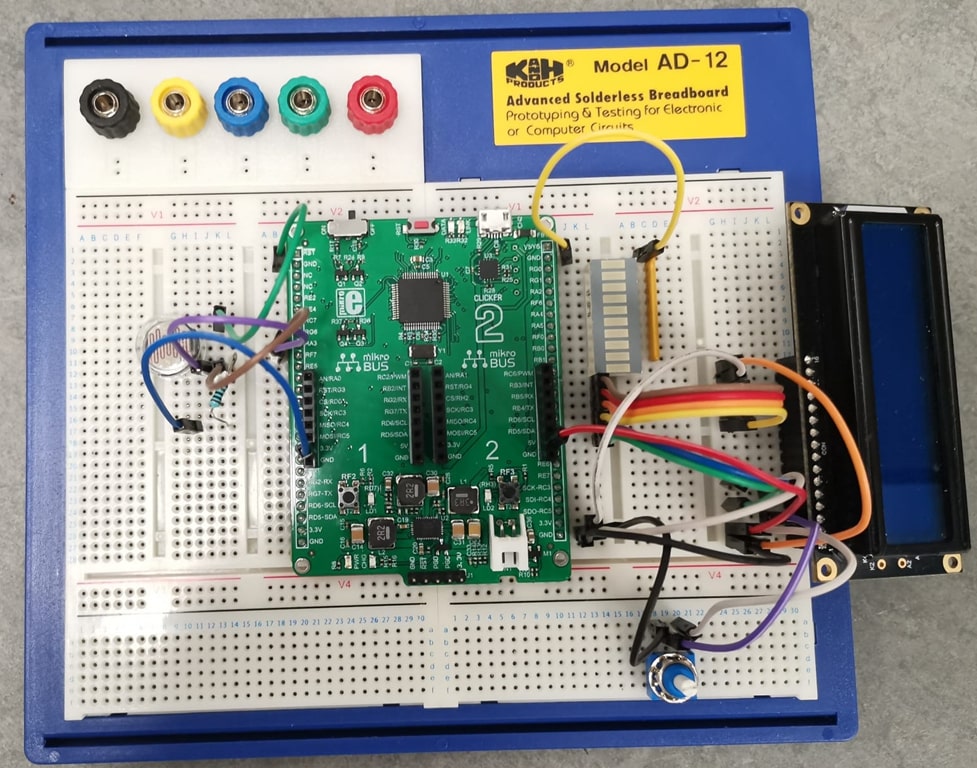
Light Detecting Street Lamp
Intelligent street lamp with automatic light detection and adaptive brightness control for energy-efficient urban lighting.
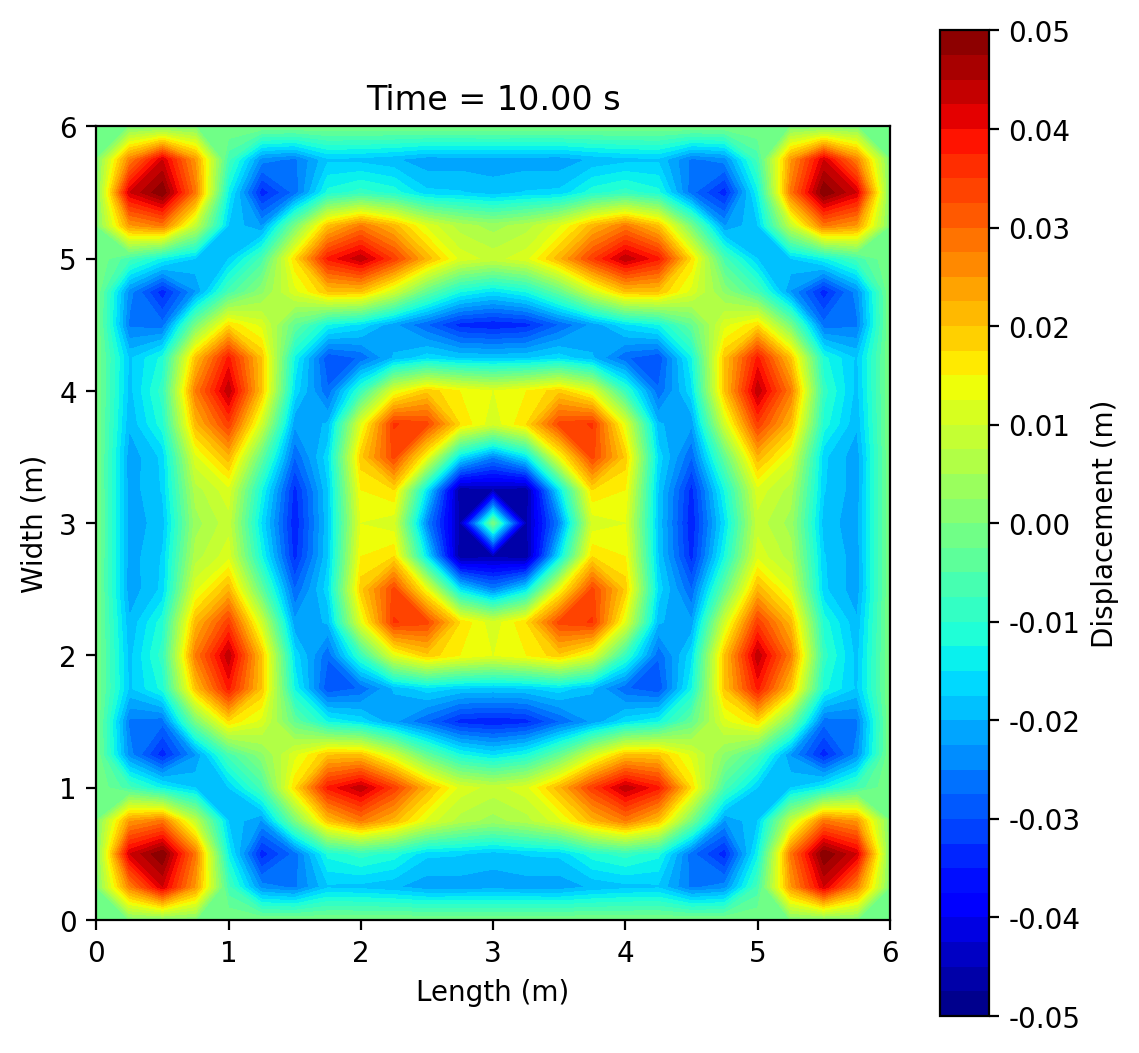
Wave Propagation Simulation
Finite-difference modeling of 2D wave equation with stability analysis, contour/3D plots, and animations.